Series 9500 Modul System Control Engineering
- Modular training system for fundamental control engineering
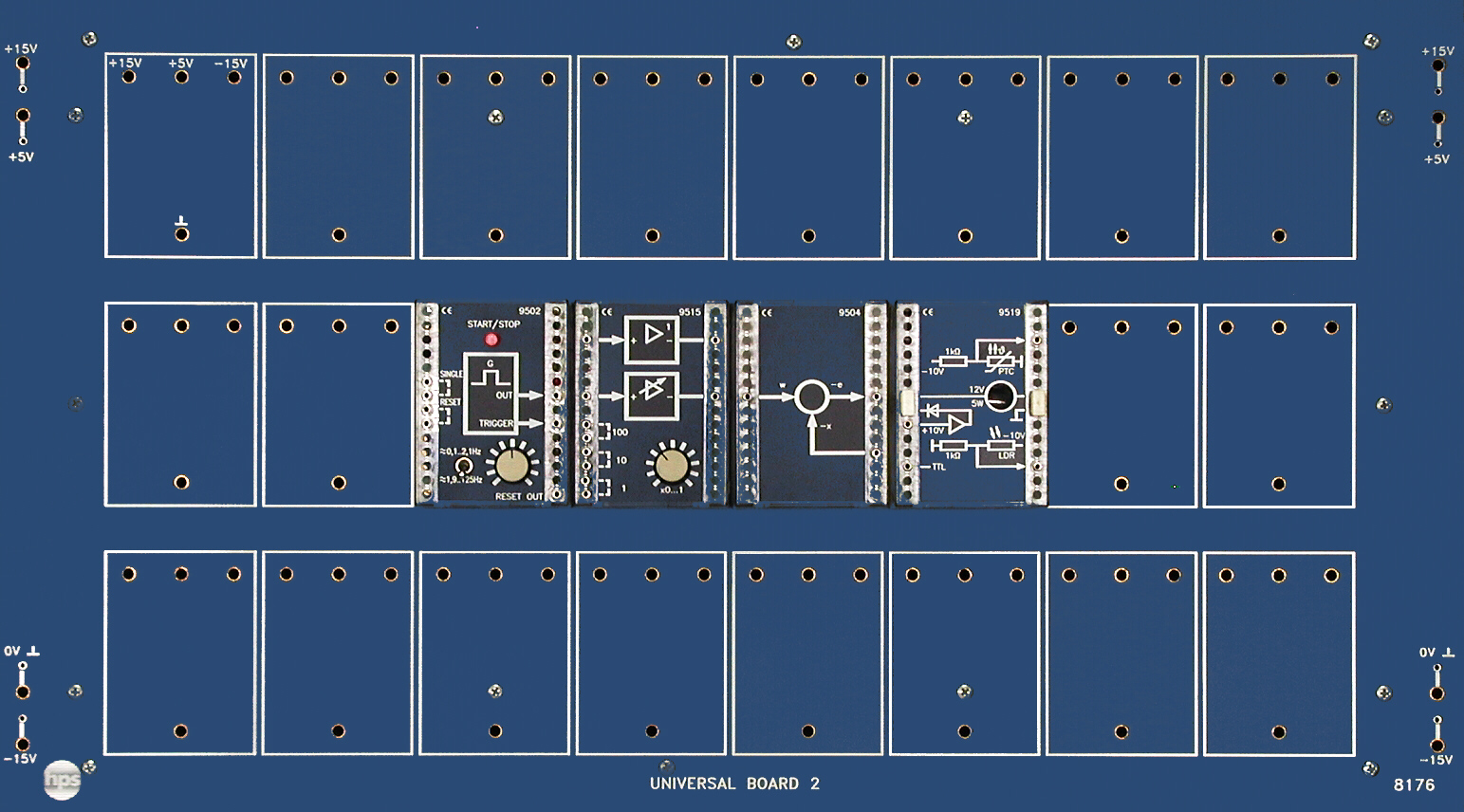
- Clear experiment set-up because only the modules required for the experiment are plugged in
- Short experiment set-up times due to central operating voltage supply
- Individual combination possibilities
- Übersichtliche Anordnung der Komponenten
- Extendible with MOTOR BOARD, SERVO BOARD and Temperature and Brightness Controlled System
- Detailed experiment descriptions
![]() – Data sheet
– Data sheet
![]() – Experiment manuals, contents
– Experiment manuals, contents

